

技术领域
本发明涉及自动控制技术领域,尤其涉及一种自动导引控制方法、控制装置及系 统。
背景技术
无人搬运车(Automated Guided Vehicle,AGV)是指装备具有自动导引装置,能够 沿规定的导引路径行驶,具有安全保护以及各种移栽功能的运输车。
基于视觉导引的AGV是通过车载摄像机获取路面的指引信息识别路径,具有路径 设置简单、便于维护与改线、不受电磁场干扰、可方便的识别多工位和路径分支等诸多优 点,近年来得到很快的发展。视觉导引是通过车载摄像机获取局部视野中的指引信息,即 AGV与路径标志线的相对偏差,实现路径跟踪,目前大量的研究集中于几种常用的控制方 法,包括PID控制、最优控制、模糊控制等,现有技术中有将最优控制与模糊控制相结合、专 家驾驶经验与PID控制相结合等控制方法。
但基于视觉导引的AGV系统是一个典型的时延、非线性不稳定系统,且具有非完 整性约束,上述传统方法在解决AGV的路径跟踪问题时,局限于局部的纠偏,只能基于摄像 头视野内的图像进行纠偏,无法从全局角度把握整个控制过程,控制参数整定困难,且难以 处理客观存在的输入约束和状态约束。
发明内容
在下文中给出关于本发明的简要概述,以便提供关于本发明的某些方面的基本理 解。应当理解,这个概述并不是关于本发明的穷举性概述。它并不是意图确定本发明的关 键或重要部分,也不是意图限定本发明的范围。其目的仅仅是以简化的形式给出某些概念, 以此作为稍后论述的更详细描述的前序。
一方面,本发明提供一种自动导引控制方法,包括:
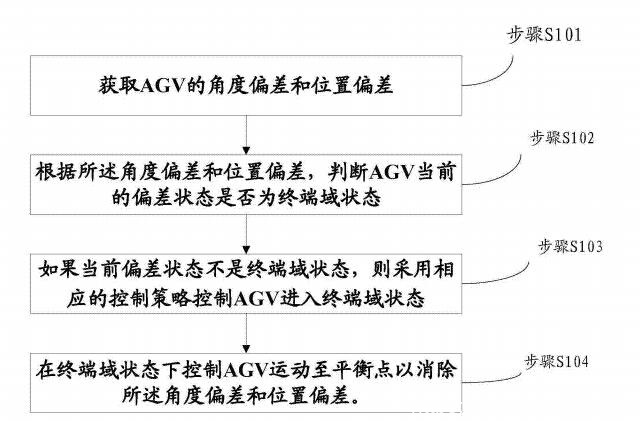
获取AGV的角度偏差和位置偏差;
根据所述角度偏差和位置偏差,判断AGV当前的偏差状态是否为终端域状态;
如果不是,则采用相应的控制策略控制AGV进入终端域状态;
在终端域状态下控制控制AGV运动至平衡点以同时消除所述角度偏差和位置偏 差。
另一方面,本发明提供一种自动导引控制装置,包括:
偏差获取模块,用于获取AGV的角度偏差和位置偏差;
状态判断模块,用于根据所述角度偏差和位置偏差,判断AGV当前的偏差状态是 否为终端域状态;
状态转换模块,用于当所述AGV当前的偏差状态不为终端域状态时,控制采用相 应的控制策略控制AGV进入终端域状态;
偏差消除模块,用于在终端域状态下控制控制AGV运动至平衡点以消除所述角度 偏差和位置偏差。
另一方面,本发明提供一种自动导引系统,包括上述的自动导引控制装置,还包括 AGV以及路径标识线,所述AGV设置有摄像头,所述摄像头沿所述AGV参考中心线探出预设 距离安装于所述AGV前方。
本发明提供的自动导引控制方法、控制装置及系统,利用AGV的角度偏差和位置 偏差通过计算规划出AVG的未来一段时间内的行驶轨迹以消除偏差,从全局角度把握整个 控制过程。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现 有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本 发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以 根据这些附图获得其他的附图。










暂无评论内容