

技术领域
本发明涉及机器人技术领域,特别涉及一种机器人的行驶控制方法和装置。
背景技术
随着技术的进步,工业生产的智能化程度越来越高,机器人相比人工更能适应高强的工作环境,进而逐渐取代人工在生产生活中发挥着越来越重要的作用,比如,机器人用于运输货物等。
目前,一些用于运输货物的机器人多采用寻迹的方式进行行驶。具体的,工作人员可以预先在厂房的地面上设置相应的导引线,机器人可以在行驶过程中不断检测导引线,并沿着检测到的导引线进行行驶,直到行驶到终点,进行货物卸载处理。
在实现本发明实施例的过程中,发明人发现现有技术至少存在以下问题:
某些情况下,机器人容易在运输物料过程中脱离导引线,例如,地面有油渍时,机器人会在惯性作用下滑出导引线。机器人脱离了导引线之后,无法检测到导引线,进而,无法沿着导引线行驶,从而,导致货物运输失败。
发明内容
为了解决现有技术的问题,本发明实施例提供了一种机器人的行驶控制方法和装置。所述技术方案如下:
第一方面,提供了一种机器人的行驶控制方法,所述方法包括:
当在行驶过程中检测不到预先布置在地面的导引线时,控制机器人按照弧线继续行驶;
在弧线行驶过程中,当检测到导引线时,控制机器人按照导引线继续行驶。
可选的,当在行驶过程中检测不到预先布置在地面的导引线时,控制机器人按照弧线继续行驶,包括:
当在行驶过程中检测不到预先布置在地面的导引线时,控制机器人的转向轮的转向角度调整为第一预设角度,保持第一预设角度继续行驶。
可选的,所述方法还包括:
在弧线行驶过程中,当达到预设调整条件时,控制机器人的转向轮的转向角度缩小第二预设角度,按照半径增大的弧线继续行驶。
可选的,在弧线行驶过程中,当达到预设调整条件时,控制机器人的转向轮的转向角度缩小第二预设角度,按照半径增大的弧线继续行驶,包括:
在弧线行驶过程中,每达到预设的调整周期时,控制机器人的转向轮的转向角度缩小第二预设角度,按照半径增大的弧线继续行驶。
可选的,所述方法还包括:
在按照导引线继续行驶的过程中,当首次通过检测部件扫描到位置信息时,向服务器发送携带有行驶路线获取请求,其中,行驶路线获取请求中携带有位置信息,以使服务器根据位置信息确定行驶路线;
当接收到服务器发送的行驶路线时,控制机器人按照行驶路线在导引线上行驶。
可选的,在弧线行驶过程中,当检测到导引线时,控制机器人按照导引线继续行驶,包括:
在弧线行驶过程中,当检测到导引线时,确定当前行驶方向与导引线的目标夹角,并确定机器人的转向轮当前的转向角度;
根据预先存储的以行驶方向与导引线的夹角、转向轮的转向角度、转向轮的回转角速度为变量的回转角速度计算公式,计算目标夹角和转向轮当前的转向角度对应的目标回转角速度;
控制转向轮以目标回转角速度调整转向轮的转向角度,按照导引线继续行驶。
第二方面,提供了一种机器人的行驶控制装置,所述装置包括:
控制模块,用于当在行驶过程中检测不到预先布置在地面的导引线时,控制机器人按照弧线继续行驶;
控制模块,还用于在弧线行驶过程中,当检测到导引线时,控制机器人按照导引线继续行驶。
可选的,控制模块用于:
当在行驶过程中检测不到预先布置在地面的导引线时,控制机器人的转向轮的转向角度调整为第一预设角度,保持第一预设角度继续行驶。
可选的,控制模块还用于:
在弧线行驶过程中,当达到预设调整条件时,控制机器人的转向轮的转向角度缩小第二预设角度,按照半径增大的弧线继续行驶。
可选的,控制模块用于:
在弧线行驶过程中,每达到预设的调整周期时,控制机器人的转向轮的转向角度缩小第二预设角度,按照半径增大的弧线继续行驶。
可选的,机器人还包括:
确定模块,用于在按照导引线继续行驶的过程中,当首次通过检测部件检测到位置信息时,向服务器发送行驶路线获取请求,其中,行驶路线获取请求中携带有位置信息,以使服务器根据位置信息确定行驶路线;
控制模块,用于当接收到服务器发送的行驶路线时,控制机器人按照行驶路线在导引线上行驶。
可选的,控制模块用于:
在弧线行驶过程中,当检测到导引线时,确定当前行驶方向与导引线的目标夹角,并确定机器人的转向轮当前的转向角度;
根据预先存储的以行驶方向与导引线的夹角、转向轮的转向角度、转向轮的回转角速度为变量的回转角速度计算公式,计算目标夹角和转向轮当前的转向角度对应的目标回转角速度;
控制转向轮以目标回转角速度调整转向轮的转向角度,按照导引线继续行驶。
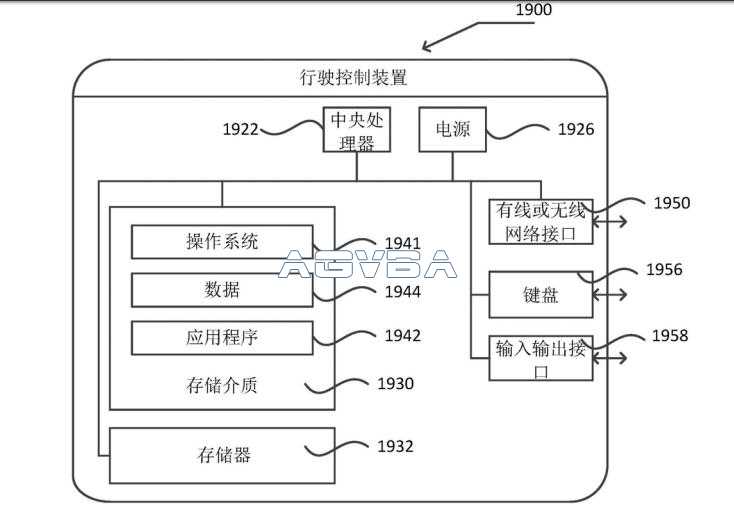
第三方面,提供了一种存储介质,存储介质存储有计算机程序,计算机程序被处理器执行时实现第一方面所述的方法步骤。
第四方面,提供了一种机器人,机器人包括处理器、存储器、检测部件和行驶轮,其中,存储器,用于存放计算机程序;处理器,用于执行所述存储器上所存放的程序,实现第一方面任一所述的方法步骤。
本发明实施例提供的技术方案带来的有益效果是:
本发明实施例中,当在行驶过程中检测不到预先布置在地面的导引线时,控制机器人按照弧线继续行驶,在弧线行驶过程中,当检测到导引线时,控制机器人按照导引线继续行驶。这样,机器人自身寻找导引线,进而,机器人可以继续沿着导引线行驶,使得货物运输成功。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。









暂无评论内容