

CN102890511B一种激光导引的sd型agv系统的导引方法
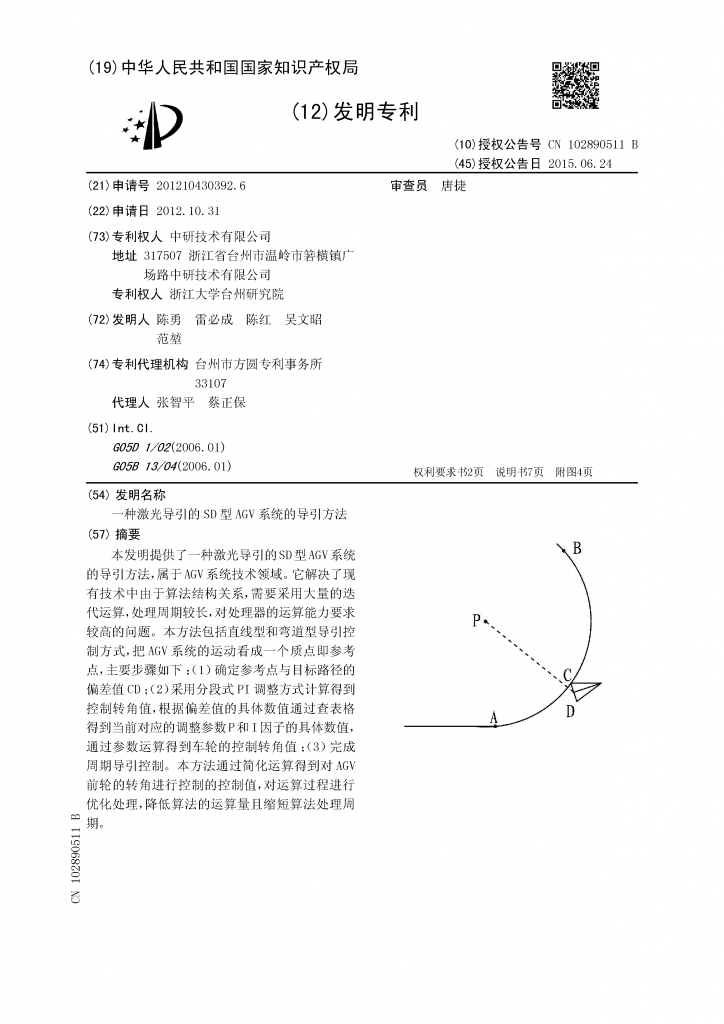
本发明提供了一种激光导引的SD型AGV系统的导引方法,属于AGV系统技术领域。它解决了现有技术中由于算法结构关系,需要采用大量的迭代运算,处理周期较长,对处理器的运算能力要求较高的问题。本方法包括直线型和弯道型导引控制方式,把AGV系统的运动看成一个质点即参考点,主要步骤如下:(1)确定参考点与目标路径的偏差值CD;(2)采用分段式PI调整方式计算得到控制转角值,根据偏差值的具体数值通过查表格得到当前对应的调整参数P和I因子的具体数值,通过参数运算得到车轮的控制转角值;(3)完成周期导引控制。本方法通过简化运算得到对AGV前轮的转角进行控制的控制值,对运算过程进行优化处理,降低算法的运算量且缩短算法处理周期。
专利类型:发明专利
申请(专利)号:CN201210430392.6
申请日期:2012年10月31日
公开(公告)日:2013年1月23日
公开(公告)号:CN102890511A
主分类号:G05D1/02,G05D1/00,G,G05,G05D,G05D1
分类号:G05D1/02,G05D1/00,G,G05,G05D,G05D1
申请(专利权)人:台州清华机电制造有限公司,浙江大学台州研究院
发明(设计)人:陈勇,雷必成,陈红,吴文昭,范堃
主申请人地址:317507 浙江省台州市温岭市箬横镇广场路台州清华机电制造有限公司
专利代理机构:台州市方圆专利事务所 33107
代理人:张智平,蔡正保
国别省市代码:浙江;33
主权项:一种激光导引的SD型AGV系统的导引方法,包括直线型和弯道型导引控制方式,把AGV系统的运动看成一个质点即参考点,其特征在于,主要步骤如下:(1)确定参考点与目标路径的偏差值CD确定AGV系统的参考点当前实际位置与目标路径上的最接近位置值的偏差值;(2)采用分段式PI调整方式计算得到控制转角值根据偏差值的具体数值通过查表格得到当前对应的调整参数P和I因子的具体数值,通过参数运算得到车轮的控制转角值;(3)完成导引控制采用对应的转角控制值控制车轮转动到相应的位置,完成一个周期的导引控制。
法律状态:公开,公开











暂无评论内容